
Ce texte reprend et développe des idées exposées dans un Colloque en hommage à Gilles Châtelet et ensuite dans divers séminaires. Gilles était une personnalité tout à fait singulière, mathématicien et philosophe1, ou plus exactement, les deux à la fois, et je ne crois pas trahir sa mémoire en écrivant que c’était aussi un ami.
Ce texte s’adresse donc à des personnes à l’image de Gilles, ouvertes aux nouveaux langages et aux idées nouvelles, autant dire à peu de gens, et pas spécialement aux mathématiciens. Ces lignes sont surtout un prétexte pour illustrer la thèse que les concepts mathématiques ne diffèrent pas fondamentalement des concepts philosophiques, ni même des idées du quotidien. Cela ne veut bien sûr pas dire que les mathématiques valident l’intuition ordinaire, c’est même souvent le contraire comme on le voit par exemple avec la notion d’infini2.
N’importe quel étudiant qui résout une équation, ou un système d’équations, est confronté à deux problèmes : l’existence et l’unicité de la solution. En théorie des ensembles, le concept d’existence se traduit en celui d’ “appartenir”: on n’existe pas de manière abstraite, hors de toutes frontières, mais on appartient à un ensemble, ou on n’y appartient pas. Cela dit, rien n’empêche en mathématique de créer ce qui n’existe pas, mais le problème se pose alors de l’intérêt, de la signification géométrique, de l’objet créé. Si l’on veut résoudre une équation qui n’a pas de solutions dans un ensemble donné, on peut toujours rajouter formellement des solutions à cet ensemble. Ce procédé n’a en général strictement aucun intérêt, mais pas toujours : ajouter aux nombres réels une racine de -1 pour résoudre l’équation x2=-1 n’est sûrement pas sans intérêt. Mais l’existence n’est pas le thème de cet exposé.
Pour des raisons psychologiques bizarres, l’existence est privilégiée sur l’unicité, on considère intuitivement que c’est plus important. En fait, l’unicité vient avant l’existence, l’unicité précède l’existence (pour paraphraser un philosophe bien connu3), ce “avant” ayant un sens précis4, et il est vrai que dans la pratique, l’unicité est souvent plus facile à obtenir que l’existence.
Ici, je vais surtout parler d’unicité5, ou plutôt du concept d’identité, et montrer en quoi ce concept est opératoire. On abordera donc la question du statut de l’égalité en mathématiques et de ses variantes, isomorphisme, équivalence, etc., une question totalement ignorée jusque récemment, mais dont l’importance est telle qu’elle est à l’origine d’une possible remise en cause de la théorie des ensembles.
Une remarque pour clore cette introduction. Le problème rencontré par tout auteur traitant de mathématiques est qu’il s’adresse souvent à un public non seulement totalement ignorant de ce que sont les mathématiques mais aussi allergique et même souvent hostile à tout ce qui pourrait s’y référer. La culture mathématique de base ne fait pas partie de la culture générale et l’on rencontre des personnes qui seront scandalisées si vous ne connaissez pas la différence entre art gothique et art roman mais qui eux ne savent pas la différence entre un nombre rationnel et un nombre irrationnel. D’ailleurs, qui, hormis les mathématiciens, sait ce qu’est un nombre rationnel ?
Cependant les choses changent, lentement. Un certain nombre de livres sont récemment sortis dans le but de faire mieux connaître les mathématiques (ou peut-être surtout l’auteur du livre) d’un large public.6 Il convient peut-être de citer aussi le livre de Alain Badiou, Éloge des mathématiques, mais s'il défend cette idée que les mathématiques font partie intégrante de la culture et surtout de la culture philosophique, c'est pour mieux les mettre au service d'idées philosophico-politiques hautement contestables.7
Ensembles et fonctions / catégories et foncteurs
Les mathématiques sont souvent associées dans le public éduqué, si ce n’est confondues, avec la théorie des ensembles (Cantor, fin du xixe siècle), et effectivement, les mathématiques se développent essentiellement dans le cadre de cette théorie, dans l’axiomatique de Zermelo-Frankel (ou ZFC, C pour l’axiome du choix).
Mais le point de vue ensembliste est maintenant supplanté dans de nombreux champs des mathématiques et de la physique depuis plus d’un demi-siècle par le point de vue catégorique, introduit par Eilenberg-McLane et formidablement développé par Grothendieck8. L’idée sous-jacente aux catégories est que les objets mathématiques ne prennent toute leur force que mis en relation avec d’autres objets du même type. Ce “point de vue” catégorique s’inscrit dans un vaste mouvement intellectuel des années 50 dont le structuralisme de Claude Lévi-Strauss ou la linguistique de Noam Chomsky sont des illustrations. Le passage des ensembles aux catégories peut donc revendiquer le statut de révolution conceptuelle.
Notons que, pas plus que la théorie de la relativité ne se substitue à la mécanique classique, la théorie des catégories ne se substitue à celle des ensembles, elle l’enrichit. Dans la pratique (bien que ce ne soit pas indispensable), le langage des catégories utilise l’axiomatique des ensembles.
Un ensemble A est une collection d’éléments a,b,c... sans relations entre eux (on peut penser à des points d’un espace géométrique). On dit que a appartient à A et on écrit a∈A. La seule relation entre a et b est l’égalité ou sa négation, a=b ou bien a≠b. Étant donnés deux ensembles A et B, une application (on dit aussi “une fonction”) φ:A→B associe à tout élément a∈A un unique élément φ(a)∈B. Étant donnée une application φ:A→B et une application ψ:B→C, on peut définir une nouvelle application ψ∘φ:A→C en posant (ψ∘φ)(x)=ψ(φ(x)).
La “famille” de tous les ensembles est le premier exemple de ce qu’est une catégorie. La catégorie Ens des ensembles a pour objets les ensembles et étant donnés deux ensembles A et B, les morphismes de A dans B sont les applications de A dans B. Si l’on axiomatise les propriétés de ces applications on obtient la notion de catégorie.
Une catégorie 𝒞 possède des objets X,Y,Z,... (comme un ensemble possède des éléments) mais maintenant, étant donnés deux objets X et Y de 𝒞, on se donne un nouvel ensemble, Hom𝒞(X,Y), appellé l’ensemble des morphismes de X vers Y. On représente un élément f de Hom𝒞(X,Y) par une flèche f:X→Y ou encore Xf→Y. On dit que X est la source de f et Y son but. Attention : les objets X, Y, etc. ne sont pas en général des ensembles, et à fortiori, un morphisme f:X→Y n’est pas nécessairement une application entre ensembles. “Morphisme” est le nom que l’on donne aux éléments de l’ensemble Hom𝒞(X,Y), rien de plus.
Si g:Y→Z est un autre morphisme qui a pour source le but de f, on peut (c’est un axiome, pas une propriété) alors composer g et f en un morphisme g∘f:X→Z :
 ,
,
et l’on suppose que la composition des flèches est associative : si on a des flèches Xf→Yg→Zh→W alors
h∘(g∘f)=(h∘g)∘f
ce que l’on visualise par le diagrame commutatif ci-dessous.
 .
.
Ce diagramme commutatif signifie que les deux manières d’aller de X à W, l’une en passant par Y, l’autre par Z, donnent le même résultat. La commutativité du diagramme traduit donc l’axiome d’associativité de la composition des morphismes.
Enfin, chaque objet X est muni d’une flèche idX:X→X qui joue le rôle de l’application identique et qui vérifie f∘idX=f pour tout f:X→Y et idX∘g=g pour tout g:Z→X.
Le premier exemple de catégories est donc la catégorie Ens des ensembles, dont les objets sont les ensembles, et les morphismes les applications ensemblistes. Mais l’“ensemble” des objets de cette catégorie n’est pas un ensemble : on sait depuis Bertrand Russel qu’il n’existe pas d’ensemble de tous les ensembles, une variante du paradoxe grec de “tous les Crétois sont des menteurs”. Afin d’éviter ce paradoxe on se place dans un univers 𝒰 donné et l’on obtient ainsi la catégorie 𝒰-Ens des ensembles appartenant à l’univers 𝒰9. Mais qu’est-ce qu’un univers ? C’est un ensemble très gros, qui contient l’ensemble Z des entiers naturels et qui est stable par plein d’opérations. Un utilisateur des catégories est rapidement confronté à des problèmes inextricables s’il n’utilise pas la notion d’univers (ou d’autres notions équivalentes, comme celle de cardinal inaccessible), mais existe-t-il des univers ? On trouve dans SGA4 un Appendice10 signé N. Bourbaki dans lequel la théorie est introduite et l’axiome fondamental demandant que tout ensemble appartienne à un univers est énoncé. Mais le style et l’objet de cet Appendice sont en total contradiction avec ce à quoi Bourbaki nous avait habitué et il serait intéressant de connaître le rôle exact de Grothendieck dans l’élaboration de ce texte. Notons que Bourbaki n'a pratiquement rien publié depuis 40 ans et que Grothendieck a quitté ce groupe au début des années 60.
Une catégorie très naturelle, très intuitive, est la catégorie Ensf des ensembles finis. Une bonne partie des mathématiques de l’école primaire lui est consacrée, ou en tous cas devrait l’être.
Les étudiants de premier cycle de mathématiques rencontrent essentiellement deux catégories :
- la catégorie Vectf(R) dont les objets sont les espaces vectoriels de dimension finie sur le corps R des nombres réels (ou mieux, le corps C des nombres complexes) et les morphismes, sont les applications linéaires ;
- la catégorie Top dont les objets sont les espaces topologiques (ceux sur lesquels on a une notion “de voisinage” ou de “limite”) et les morphismes sont les applications continues (celles qui respectent les limites).
Si 𝒞 est une catégorie, on obtient une nouvelle catégorie 𝒞op, la catégorie opposée, en gardant les mêmes objets mais en inversant le sens des flèches. Ainsi, un morphisme f:X→Y dans 𝒞op n’est par définition rien d’autre qu’un morphisme g:Y→X dans 𝒞.
L’idée de base des catégories est qu’il ne faut pas se contenter de contempler les objets mais qu’il faut s’intéresser à leurs relations, aux morphismes. Mais qu’est-ce qu’un morphisme de catégories ? C’est ce que l’on appelle un foncteur. Étant données deux catégories 𝒞 et 𝒞', un foncteur F: 𝒞 →𝒞' envoie tout objet X de 𝒞 en un objet F(X) de 𝒞' et tout morphisme f:X→Y en un morphisme F(f):F(X)→F(Y), avec les conditions évidentes que F commute aux identités F(idX)=idF(X) et aux compositions F(g∘f)=F(g)∘F(f). Les foncteurs se composent, et l’on obtient ainsi la catégorie 𝒰-Cat qui vit dans un plus grand univers. Si l’on veut rester dans l’univers 𝒰 il faut se restreindre aux “petites catégories” et l’on obtient la 𝒰-catégorie “small-Cats”.
La catégorie Ens des ensembles a beaucoup de propriétés dont on aimerait faire profiter les catégories et en fait, étant donnée une catégorie 𝒞, il est possible de la plonger dans une catégorie plus grosse qui aura plus ou moins les mêmes propriétés que Ens : c’est la catégorie 𝒞^ des prefaisceaux sur 𝒞, c’est-à-dire des foncteurs de 𝒞op dans Ens. Pour cela, à tout objet X∈ 𝒞, on associe le prefaisceau qui à tout objet Y de 𝒞 associe l’ensemble Hom𝒞(Y,X). Le fait que ce foncteur de 𝒞 dans 𝒞^ conserve les propriétés de 𝒞 (on dit que ce foncteur est pleinement fidèle) est le fameux “lemme de Yoneda”.
L’un des pièges de la catégorie des ensembles est qu’elle n’est pas équivalente à sa catégorie opposée. La théorie des ensembles n’est pas “symétrique” et ce manque de symétrie est source de nombreuses erreurs chez les étudiants.
Donnons une démonstration que s’abstiendront de lire les non-mathématiciens et les professionnels.
L’ensemble vide ∅ est un objet initial dans la catégorie Ens des ensembles, ce qui veut dire que pour tout ensemble X, il existe une et une seule application de ∅ vers X. De même, un ensemble réduit à un élément, appelons-le pt, est final, ce qui veut dire que pour tout ensemble X, il existe une et une seule application de X vers pt. Supposons qu’il existe un foncteur F: Ens → Ensop qui soit une équivalence de catégories (terme dont la définition est provisoirement laissée à l’intuition du lecteur). Alors F(pt)=∅ et F(∅)≃pt11. On en déduit :
HomEns(pt,X)≃HomEnsop(F(pt),F(X))
≃HomEns(F(X),F(pt))≃HomEns(F(X),∅).
Si l’on choisit pour X un ensemble à deux éléments, alors HomEns(pt,X) a deux éléments contrairement à HomEns(F(X),∅) qui a un élément si F(X) est vide (l’identité du vide) et zéro élément sinon.
Égalités et isomorphismes
Dans un ensemble A, on a la notion d’égalité. Étant donnés a et b, soit ils sont égaux, soit ils sont différents. Ce qui fait la force de la théorie des catégories est que l’on a une notion beaucoup plus riche, celle d’“isomorphisme”. On dit que f:X→Y est un isomorphisme s’il existe g:Y→X tel que la composition g∘f soit idX et la composition f∘g soit idY :
 .
.
S’il existe un isomorphisme entre X et Y, on écrit X≃Y. Deux objets isomorphes dans une catégorie auront alors les mêmes propriétés, sans pour autant être identiques.
Une application f entre deux ensembles A et B est injective si pour tout a1≠a2 on a f(a1)≠f(a2). Elle est surjective si pour tout b dans B il existe a dans A tel que f(a)=b. Elle est bijective si elle est à la fois injective et surjective.
On montre facilement qu’une application f entre deux ensembles A et B est un isomorphisme si et seulement si elle est bijective et deux ensembles finis sont isomorphes (en tant qu’ensembles) si et seulement si ils ont le même nombre d’éléments. Ainsi, les ensembles A={a,b,c} et B={d,e,f} sont isomorphes, mais il faut noter qu’il existe plusieurs (6 exactement) isomorphismes de A vers B. Les diagrammes ci-dessous en visualisent deux :

 .
.
On voit d’ailleurs apparaitre la notion de nombre entier: c’est “ce qui reste” quand on a identifié les ensembles finis isomorphes ; un entier peut être compris comme n’étant rien d’autre qu’un ensemble fini à isomorphisme près.
L’ensemble N des entiers naturels positifs est la “décatégorification” de la catégorie Ensf des ensembles finis, décatégorifier voulant dire oublier les morphismes et identifier des objets isomorphes.
Les intervalles X=[0,1] et Y=[0,2] de la droite réelle R sont isomorphes dans la catégorie Top des espaces topologiques. L’application continue f:X→Y, x↦2x admet comme inverse l’application g:Y→X, y↦y/2. De même (en un peu plus compliqué), la droite réelle R est isomorphe topologiquement à l’intervalle ouvert (0,1).
Par contre, le plan réel R2 est isomorphe à la droite réelle R comme ensemble mais pas comme espace topologique (ce résultat n’a rien d’évident).
2-catégories et 2-isomorphismes
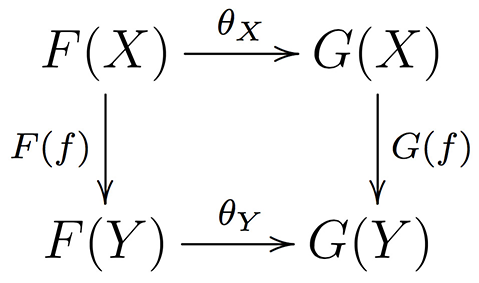
On a vu que les catégories (dans un univers 𝒰 donné) et les foncteurs entre catégories définissent une nouvelle catégorie, la catégorie 𝒰-Cat. Mais on a aussi la notion naturelle de morphisme de foncteurs. Si :
F,G:𝒞 ⇉ 𝒞',
sont deux foncteurs, un morphisme θ:F→G est la donnée pour tout X∈𝒞 d’un morphisme θX:F(X)→G(X) tel que pour tout morphisme f:X→Y dans 𝒞, le diagramme ci-dessous commute.
 .
.
Ainsi, la catégorie 𝒰-Cat n’est-elle pas seulement une catégorie, c’est une 2-catégorie. Grossièrement, une 2-catégorie (stricte) 𝒞 est une catégorie (une 1-catégorie) telle que pour toute paire d’objets X,Y de 𝒞, l’ensemble Hom𝒞(X,Y) est l’ensemble des objets d’une catégorie. Pour toute paire d’objets de Hom𝒞(X,Y), c’est-à-dire pour toute paire de morphismes f, g : X ⇉ Y, on a donc un ensemble de morphismes de f dans g. Un tel morphisme de morphismes est visualisé par le diagramme ci-dessous.
 .
.
On peut ainsi penser aux objets des catégories comme 0-dimensionnels, aux morphismes comme 1-dimensionnels et aux 2-morphismes comme 2-dimensionnels. Ou encore, on peut penser les ensembles comme des objets 0-dimensionnels (des ensembles de points sans relations entre eux), aux catégories comme des objets 1-dimensionnels (des points et des flèches entre les points) et aux 2-catégories comme des objets 2-dimensionnels. On peut imaginer alors diverses notions de n-catégories pour n≥2, une 0-catégorie étant un ensemble et une 1-catégorie une catégorie usuelle.
Rappelons que dans une catégorie 𝒞 un morphisme f:X→Y est un isomorphisme s’il existe g:Y→X tel que g∘f=idX et f∘g=idY. Dans une 2-catégorie, on a alors une notion plus faible : on demande à g∘f d’être isomorphe dans la catégorie Hom𝒞(X,X) à idX et à f∘g d’être isomorphe dans la catégorie Hom𝒞(Y,Y) à idY. On dit alors que X et Y sont équivalents ou 2-isomorphes. Les isomorphismes anciens deviennent des 1-isomorphismes, et les égalités des 0-isomorphismes.
Dans une n-catégorie on aura alors n+1 niveaux d’isomorphismes, 0-isomorphe voulant dire égal.
Si deux catégories 𝒞 et 𝒞' sont équivalentes, i.e. 2-isomorphes dans la 2-catégorie 𝒰-Cat, alors on pourra traduire les propriétés de 𝒞 dans le formalisme de 𝒞' et cela a parfois donné lieu à des découvertes spectaculaires.
Un jeu très prisé des mathématiciens est de trouver des catégories équivalentes qui à première vue ne se ressemblent pas du tout. La “symétrie miroir” dans la formulation de Maxim Kontsevitch est une équivalence de catégories. Notons que l’idée de cette symétrie miroir est issue de la physique, plus précisément de la théorie des cordes.
Donnons un exemple basique d’équivalence de catégories. Considérons d’une part la catégorie Vectf(R) des espaces vectoriels de dimension finie sur le corps R des nombres réels, d’autre part la catégorie 𝒜 dont les objets sont les entiers N={0,1,2,...} et les morphismes de m∈N vers n∈N, les matrices (n,m) à coefficients dans R. On a un foncteur naturel de 𝒜 vers Vectf(R) qui associe l’espace Rn à l’entier n et qui, à une matrice (n,m), associe une certaine application linéaire de Rm vers Rn. Montrer que cette construction est bien un foncteur et que ce foncteur est une équivalence de catégories est l’objet d’une bonne partie du cours d’algèbre linéaire du premier cycle universitaire de mathématiques.
Du local au global : recollement et torsion
Les mathématiciens adorent recoller des objets, passer du local au global, et calculer les “obstructions” qui empêchent les recollements. C’est alors que le problème du statut des isomorphismes prend toute sa pertinence. Ces obstructions ayant parfois une interprétation en physique, on voit une fois de plus un exemple où des questions qui apparaissent au départ comme des questions de fondement, se révèlent être en fait des questions concrètes.
Donnons quelques exemples.
La sphère S2 (penser à la surface de la terre) est localement isomorphe (au sens topologique du terme) au plan : cet isomorphisme permet de fabriquer des cartes routières. Mais s’il n’existe aucune carte qui représente la terre tout entière ce n’est pas par hasard. Il y a une obstruction topologique qui empêche l’existence d’un isomorphisme global entre la sphère et le plan. Notons que, en tant qu’ensembles (si l’on oublie la topologie), cette obstruction disparaît.
Considérons maintenant la bande de Moebius X que l’on coupe en trois morceaux12 X1, X2 et X3 si bien qu’il n’y ait pas d’intersections 3 à 3.
On peut considérer chaque Xi(i=1,2,3) comme la copie d’un rectangle X0 et la bande de Moebius est obtenue en recollant X1 et X2 puis X2 et X3 et enfin −X3 et X1 où −X3 désigne le rectangle déduit de X3 en échangeant “haut et bas”.
Munissons maintenant X0 d’un angle orienté F0. Le rectangle −X0 est alors muni de l’angle orienté −F0. Considérons trois copies (X1,F1), (X2,F2), (X3,F3) de (X0,F0). On recolle (X1,F1) et (X2,F2) puis (X2,F2) et (X3,F3) mais on ne peut pas recoller (X1,F1) avec (−X3,−F3).
On voit sur cet exemple que la notion d’isomorphisme est essentielle dans les questions de recollement : on ne peut recoller que des objets isomorphes (dans la catégorie dans laquelle on travaille, ici les ouverts orientés du plan).
La notion d’angle orienté n’a pas de sens sur la bande de Moebius. Prenons en effet un tel angle et déplaçons-le sur la bande : après un tour, on obtiendra l’angle opposé ! (Et bien sûr, après deux tours, on retrouve l’angle de départ.) Ceci montre que les angles orientés, bien que parfaitement définis localement, n’existent pas globalement dans cette situation. On dit que la bande de Moebius n’est pas orientable.


Figure : Moebius
L’exemple de la bande de Moebius n’est pas un cas exceptionnel ou pathologique, il est au contraire le prototype de situations extrêmement courantes et variées que l’on rencontre tous les jours en mathématiques. De plus, bien que ces angles orientés ne se recollent pas, ils appartiennent à un objet mathématique globalement bien défini que l’on appelle le faisceau d’orientation.
2-catégories faibles et ∞-catégories
Dans une catégorie usuelle (une 1-catégorie), la composition des morphismes est associative. Si f,g,h sont des morphismes composables, alors (h∘g)∘f=h∘(g∘f). Mais si l’on travaille dans une 2-catégorie, les morphismes f,g,h n’appartiennent plus à des ensembles, mais à des catégories, et comme on l’a vu, la notion d’égalité peut être affaiblie par celle d’isomorphisme. On obtient ainsi la notion de 2-catégorie faible dans lesquelles la composition n’est plus associative, mais l’est seulement “à isomorphisme près”.
On peut itérer ces constructions et définir les ∞-catégories. Un exemple en est donné par un ouvert Ω du plan R2. Les objets sont les points de Ω, les morphismes f:x→y les chemins continus allant de x à y, les 2-morphismes les homotopies de tels chemins, c’est-à-dire les déformations continues des chemins, etc. La composition des chemins n’est ni associative ni unitaire. Elle l’est “à homotopie prés”. On peut composer ces homotopies à homotopie près, etc. Cet exemple est emblématique de ce que l’on appelle un ∞-groupoide : à tous les ordres les morphismes sont des isomorphismes à homotopie près. Si cette propriété est satisfaite seulement à l’ordre ≥1, on a la notion de (∞, 1)-catégorie et cette théorie est en train de se substituer à la théorie classique, sous l’influence de Jacob Lurie et Bertrand Toën13 en particulier.
Vers la révolution
Mais cette idée que “les propriétés” ne sont satisfaites qu’à homotopie près est en train de gagner la logique mathématique et Voevodsky a le projet, pour le moins ambitieux (!), de remplacer la vieille théorie des ensembles ZFC par une nouvelle théorie dans laquelle, à la notion d’égalité, on substituerait celle d’égalité à homotopie près : c’est l’axiome d’univalence14. Dans ce nouveau cadre, les ∞-catégories deviendraient des catégories usuelles, mais dans un contexte ensembliste totalement nouveau. Inutile de dire que c’est une révolution conceptuelle majeure qui est en gestation. Mais cette idée “homotopique” est aussi à la racine d’une autre révolution, beaucoup plus concrète, qui permettra bientôt (?) de vérifier sur ordinateur la validité des démonstrations.
Les mathématiciens sont peut-être à l’aube d’une révolution qui transformera complètement leur manière de penser et aussi leur manière de travailler, un peu comme la physique quantique a bouleversé (et continue de le faire) la physique classique15. Mais il faudra sans doute quelques générations pour prendre pleinement conscience de cette révolution.
